
Autonomous Vehicle Safety
by Andy Lee
Earlier this year, my interest in mechanical engineering led me to investigate autonomous vehicles and the technology behind them. I wanted to dive into various data in order to analyze this rapidly-growing field, which has the potential of changing our transportation landscape forever. I was able to conduct this research with a mentor from the University of Michigan, and my hope is that this study will be able to address concerns about the safety of AVs.

The twenty-first century has marked a revolutionary transformation in transportation technology, driven by the rapid advancement of autonomous vehicles (AVs). What began as experimental prototypes in controlled desert races two decades ago has evolved into a global competition aimed at achieving full self-driving capability. From the early DARPA Grand Challenges of 2004–2007, where research vehicles like Stanley and NavLab 5 first demonstrated the feasibility of autonomous navigation, to today’s commercial robotaxis from Waymo, Cruise, and Tesla, the autonomous vehicle industry has developed at an exponential pace. These innovations promise a redefinition of how society moves, works, and interacts with mobility, mainly influencing the expectations and experiences of both younger and older generations.
The acceleration of AV development has given rise to two opposing arguments: one of technological optimism and one of deep societal concern. On the one hand, AVs offer potential benefits, including reduced human error, improved accessibility for the elderly and people with disabilities, and environmental efficiency. On the other hand, high-profile crashes and unclear regulatory frameworks have sparked skepticism about their safety and reliability. My research paper examines these tensions through a structured analysis of AV testing processes, regulatory standards, and several case studies that have influenced public trust and policy interventions.
Initially, AV safety validation follows a multi-phase testing model that begins with closed-track environments and advances to geo-fenced real-world testing. A geo-fenced area is used for closed-environment tests, where the public is not present. Facilities such as Mcity at the University of Michigan allow AVs to train and adapt in controlled yet realistic traffic conditions. Once stable performance is demonstrated, developers expand testing to public roads, where AVs must handle unpredictable elements of pedestrians, weather, and human drivers.
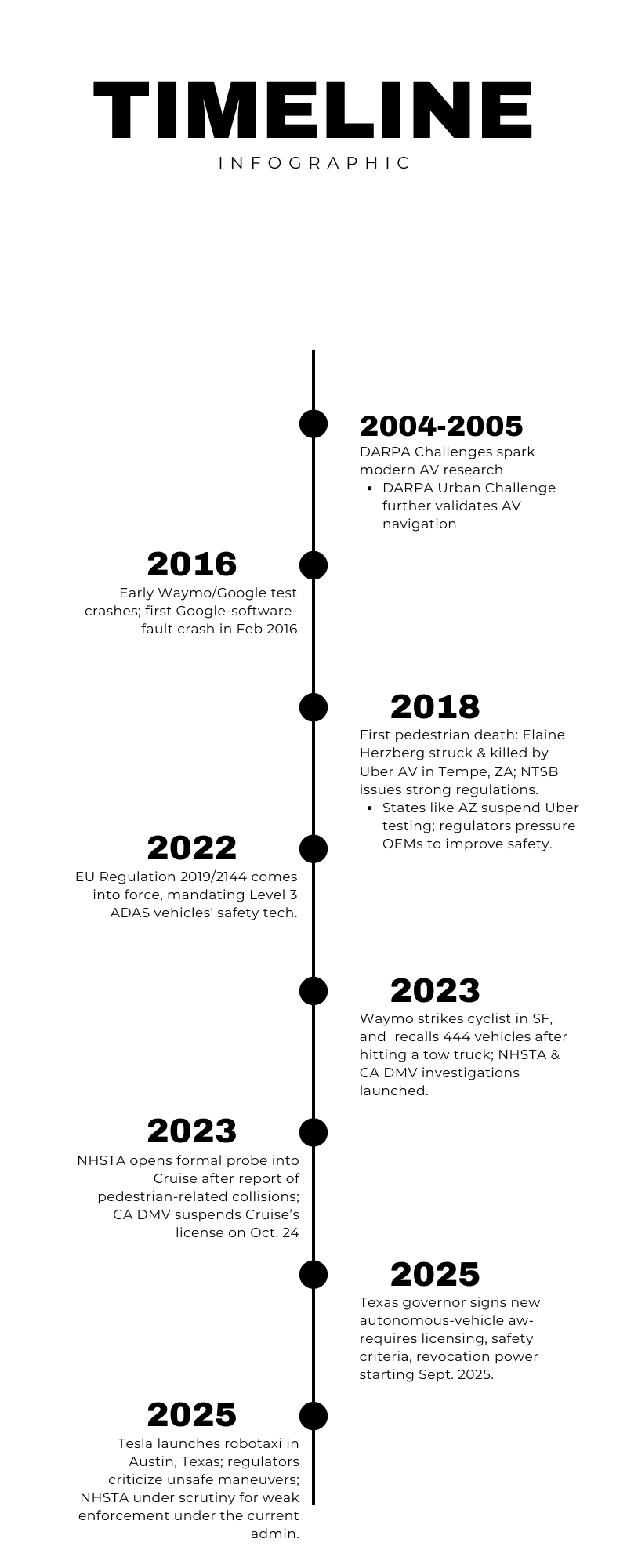
Now, we shift into the case study analysis examined in this research. There were major AV incidents between 2016 and 2025, each representing a significant turning point in public perception and regulation.
First, the 2018 Uber crash in Tempe, Arizona, in which pedestrian Elaine Herzberg was fatally struck, marked the first known death caused by an autonomous test vehicle. Next, Tesla’s Full Self-Driving (FSD) system, Cruise’s robotaxi pedestrian collisions, the most significant of which occurred in 2023, eventually ending GM Cruise’s career. And finally, Waymo’s multiple software recalls from 2023 to 2025.
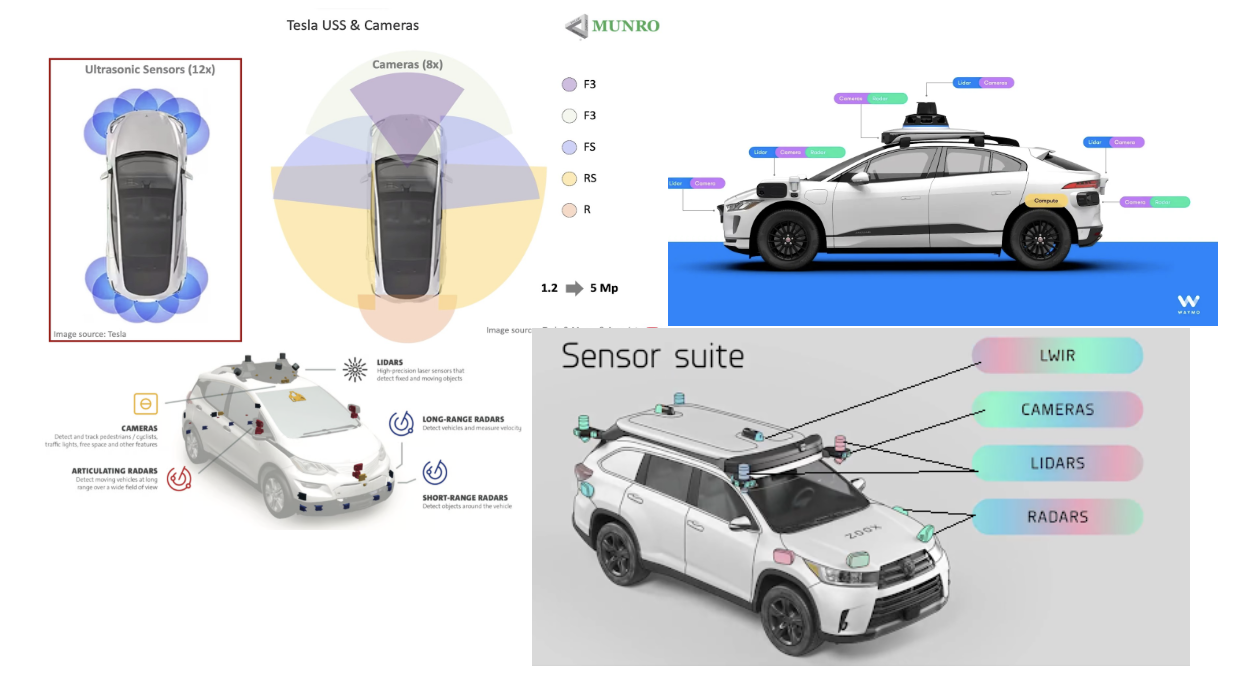
These incidents highlighted the complex challenges of scaling autonomous operations. While each company used different sensor configurations, all faced common vulnerabilities in handling rare, unpredictable scenarios. For example, Tesla’s vision-only neural network versus Waymo and Zoox’s LiDAR-based perception systems, which uses pulsed laser light to measure precise distances, had varying outcomes for their expected real-world testing.
Following these life-changing incidents, numerous improvements and additional regulations have been implemented specifically for autonomous vehicles, which self-driving companies follow today. Whether it's government-issued or state-issued, all AV companies must follow all regulatory frameworks, such as ISO 26262, SOTIF (Safety of the Intended Functionality), and UL 4600, which have become essential in ensuring AV reliability and accountability.
Here is a brief description of the regulatory frameworks that I mentioned above:
ISO 26262: This International Organization for Standardization (ISO) framework defines the functional safety requirements for automotive electronics, focusing on reducing the risks associated with hardware and software failure.
SOTIF: The Safety of the Intended Functionality framework’s purpose is to ensure that AV systems behave safely even when their design intent is correct, but environmental factors create hazards.
UL 460: This framework, introduced by Underwriters Laboratories, specifically targets the safety of autonomous systems, guiding lifecycle testing, hazard analysis, and ensuring the protection of human interaction.
Altogether, these standards establish a foundation for assessing whether AV systems can operate responsibly in open environments. However, as my research found, these frameworks often fall behind the pace of innovation, eventually leaving regulatory and ethical gaps that become visible in real-world accidents; these gaps lead to AV incidents, such as those involving Cruise and Uber.
Now, especially for us high schoolers and the emerging generation, the ability for us to fully take advantage of autonomous mobility is not too far into the future. No doubt, such transportation will soon be an integral part of our everyday lives. Teenagers growing up in cities where Waymo or Tesla FSD operates are already witnessing roads shared with self-driving vehicles. This exposure shapes their perception of mobility, responsibility, and trust in the technology. Unlike our parents or grandparents, who were accustomed to full human-driver control, we will likely view driving as an optional or even obsolete skill. AVs could redefine teenage independence by replacing the driver’s license as a thing of the past with access to shared autonomous fleets. At the same time, this shift could create dependency on corporate systems, reduce physical driving experience, and raise questions about who can afford or access these systems.

University of Michigan’s Mcity AV test track
Overall, this research aims to demonstrate that while autonomous vehicles have rapidly transformed the technological frontier of transportation, the systems governing their testing, safety, and ethics continue to undergo development. The case studies analysis revealed how company ambition, lack of human oversight, and incomplete regulation have lost public trust. The continued advancement of AVs will not only change mobility on a global scale but also reshape how younger generations engage with transportation, risk, and responsibility.
For the full research report, click here